
Diffusion and Flow Matching

Diffusion and Flow Matching
Memory Management in C++
A Complete Guide to Memory Management in C++ Introduction: The Power and Responsibility of C++ As C++ creator Bjarne Stroustrup once said, “C makes it easy to shoot yourself in the foot; C++ make...
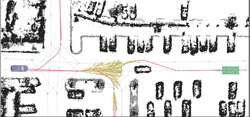
Case Studies of Planning and Decision-Making in Robotics
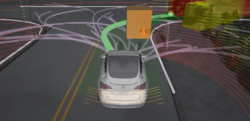
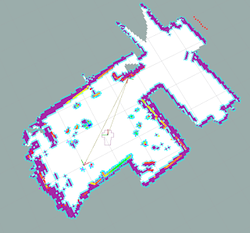
In progress Autonomous Driving Mobile Manipulators Legged Robots Coverage, Mapping, and Surveyal Frontier-based Planning A frontier is any region that lies at the boundary between explored sp...
All About Search Algorithms
In progress TO-DO: Refine RRT, RRT-Connect, RRT* POMDP Multi-robot planning Graph Search Problem Once a robot converts the environment into a discrete representation, whether by grid de...
Introduction to Reinforcement Learning
In Progress This blog is a collection of my notes based on the book “Reinforcement Learning: An Introduction by Richard S. Sutton and Andrew G. Barto”. Finite Markov Decision Processes Context ...
Deep Reinforcement Learning
In Progress This blog will only contain pseudocodes and important pointers for my reference. Deep Q Network (DQN) Double DQN Actor-Critic Network Deterministic Policy Gradient (DPG) Deep Dete...
Deep Learning - Attention & Transformers

Attention Models Problem with vanilla Seq2Seq Models In the vanilla sequence-to-sequence (Seq2Seq) model with an encoder–decoder setup: The encoder reads the entire input sequence (e.g., I ...
Deep Learning - CNNs, RNNs, & Language Models

In Progress To-Do CNNs — all LSTM, GRU Connectionist Temporal Classification Convolutional Neural Networks https://youtu.be/kYeeB3CNcx8?si=otHbiKRITjJZk9S8 Forward Pass # Input: # Y...
Deep Learning - Perceptrons
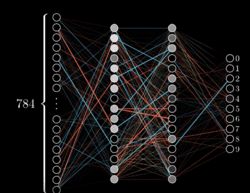
Neural Networks Depth - length of longest path from source to sink Layer - Set of all neurons which are all at the same depth with respect to the source Gradient For a scalar function $f(x)$ wit...
Coursework at CMU
This blog serves as a comprehensive collection of notes, assignments and insights from my coursework in the Master’s in Robotic Systems Development program at Carnegie Mellon University. Links wil...
Micro-ROS, RCL, & RCLC

Micro-ROS Publisher #include <micro_ros_arduino.h> #include <stdio.h> #include <rcl/rcl.h> #include <rcl/error_handling.h> #include <rclc/rclc.h> #include <rclc/e...
MuJoCo Basics

Overview of mjModel and mjData mjModel: Holds static information about the simulation model (e.g., geometry, joint limits, sensor definitions). Think of it as a blueprint for the robot/environm...
Docker for Robotics

Docker Overview Docker is a tool that helps you create, share, and run applications in containers. Containers are small, lightweight packages that include everything your application needs, like t...
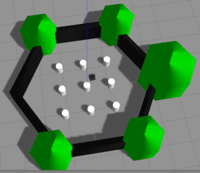
Swarm Robot Tasks and Algorithms

The following are some of the algorithms that can be used to perform different tasks with swarm robots using Python: 1. Aggregation A Geometry Based Algorithm for Swarm Aggregations In Geometry ...
Path Planning

Resources Programming Path Planning Path planning, also known as motion planning, is the process of finding a feasible path from a starting point to a desired goal point while avoiding obstacles...
Probabilistic Robotics
In progress Resources Programming Basic Concepts of Probability Terminology The environment, or world, is a dynamical system that possesses internal state. The robot can acquire information ab...
ROS Theory

Synopsis ROS is an open-source project that provides a framework to your robot. It has become an integral part of robots today, and has massively impacted the Robotics Arena. ROS is extremely fasc...
ROS Navigation
ROS Navigation 1.1 Introduction The ROS Navigation stack takes in information from odometry, sensor streams, and a goal pose and outputs safe velocity commands that are sent to a mobile base. Th...
Robot Kinematics

Joints Robot manipulators consist of links connected by joints. Higher pair joint: The two connecting elements are in contact along a line or at a point. Lower pair joint: Constrains contact bet...
Numpy

What is Numpy? Numpy is the python package that allows us to work with multidimensional array objects. It is extremely useful for scientific computing using Python, and is widely used in various...
Basic Electronics

Introduction The following notes were created for Techtainment, an event that I conducted to teach the basics of electronics and programming to people who hadn’t previously explored the field of r...