Simulation is an important aspect of building an Autonomous Underwater Vehicle (AUV). It allows the team to test and validate the robot’s design and performance in a controlled environment before deploying it in the actual competition. Simulations also enable us to identify and troubleshoot potential issues before they occur in the field, which can save valuable time and resources.
It helps us test various aspects of the robot’s design, such as its hydrodynamics, control algorithms, and sensor systems. By simulating the robot’s movement and behavior in different scenarios and environments, we can optimize its design for maximum performance.
Additionally, simulation can be used to test the robot’s autonomy and decision-making capabilities. The simulated robot can be programmed to respond to different situations and tasks, such as obstacle avoidance, path planning, and target tracking. This can help the team to build a more robust and capable robot, which can improve its chances of success in the competition.
All the simulations were carried out on Gazebo using Robot Operating System (ROS). The following were the components of the simulation/testing process:
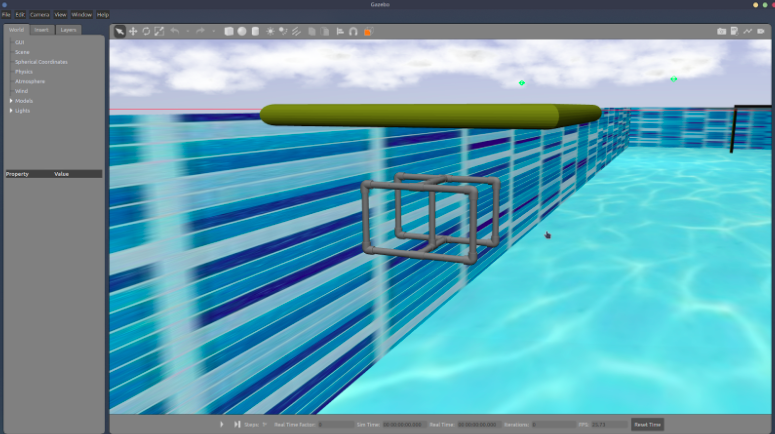
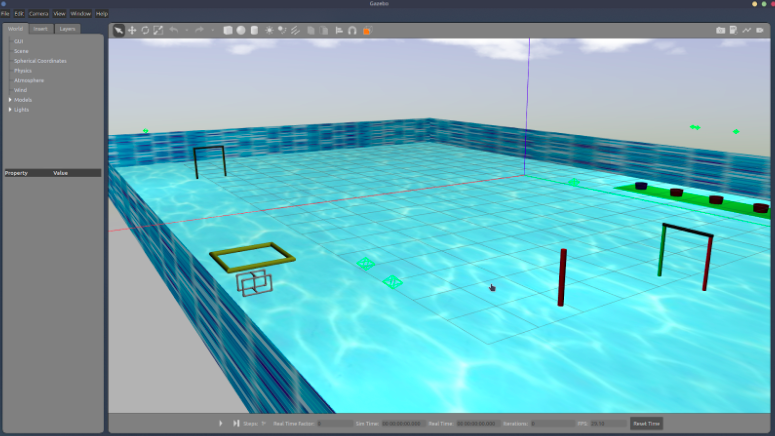
Environment - The initial environment consisted of an open ocean with objects such as a shipwreck. This environment was not enough to satisfy the simulations needed, so a pool environment called sauvc_pool which contained accurate information about the size of the pool as well as the obstacles and tasks inside the pool was implemented.
Bluerov2(ffg) - The bot we chose to simulate was the bluerov2 from Bluerobotics, as it consisted of a 6-thruster design, and its thrusters would give us an accurate idea of our own thrusters.
Bluerov in pool - The bot was integrated into the sauvc_pool environment, where it could freely interact with the tasks and obstacles. Since it was operated in ROV (Remotely Operated Vehicle) mode and not AUV mode, the bot had to be controlled with keyboard input.
Simulation Video:
6 thruster AUV in pool - Bluerov2 has 6 thrusters, but in our tests, we need to simulate the results for an AUV having anywhere from 1 to 6 thrusters and testing its DOF’s, thrust values, etc. For this, the bluerov2’s URDF files were tweaked to include/exclude thrusters as well as specify the directions they were pointed in.
Simulation Video:
ROV in pool
- After this, we imported the STL file of our own SAUVC entry into Gazebo for simulation in place of the bluerov2. The file followed the same format as that of the bluerov2 so that the thruster locations, thrust values, as well as ROV operation is possible for our bot the same way as the bluerov2.