
Capstone Project - CMU MRSD
Lunar ROADSTER
Lunar Robotic Operator for Autonomous Development of Surface Trails and Exploration Routes (ROADSTER) Supervisor: Dr. William “Red” Whittaker Team: Bhaswanth Ayapilla, Ankit Aggarwal, Deepam Amer...
Projects at CMU
RIO: Humanoid Motion Tracking & Industrial Robot Control Integration

Technical Report Your browser does not support PDFs. Please download the report here.
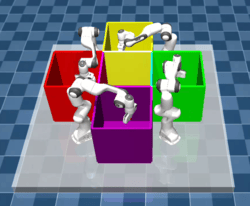
Humanoid Whole-Body Manipulation
Technical Report For videos and results, please refer to the website. Your browser does not support PDFs. Please download the report here.
Tactile Encoder for Manipulation
TEMU: Tactile Encoder for Manipulation Poster Technical Reports Your browser does not support PDFs. Please download the report here. Your browser does not support PDFs. Please down...
Language-Conditioned BEV Perception for Autonomous Driving
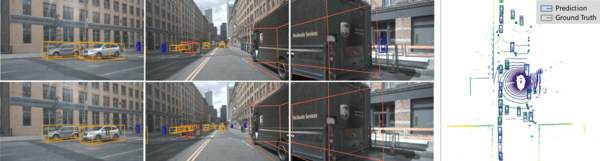
Language-Conditioned BEV Perception for Autonomous Driving Your browser does not support PDFs. Please download the report here.
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences
Techincal Report Your browser does not support PDFs. Please download the report here. Results xECBS Scene 1 Scene 2 Scene 3 Scene 4 ECBS Scene 1 Scene 2 Scene 3 Sc...
Adaptive Pixel Art using a Franka Arm

Adaptive Pixel Art using a Franka Arm Demo Minimum Viable Product Stretch Goal Images Ground Truth Franka Pixel Art Report Your bro...
Research Experience
Controller for Autonomous Surface Vehicle

The following project was completed as part of a competition at the Institute for Systems and Robotics, Lisbon under the supervision of Dr. David Cabecinhas and Dr. Pedro Batista
Development of Python-Based Simulator for Analyzing Autonomous Underwater Glider Motions and Performance

The following project was completed as part of my undergraduate thesis at the Institute for Systems and Robotics, Lisbon under the supervision of Dr. David Cabecinhas and Dr. Pedro Batista Abstr...
Multi-Agent Traffic Signal Control using Reinforcement Learning
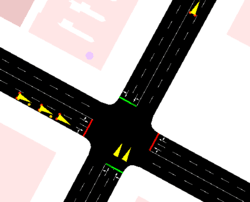
The following work was carried out during my summer internship at the Multi-Agent Robotic Motion Laboratory, National University of Singapore under the supervision of Dr. Guillaume Sartoretti. Hyb...
Analysis of Battery in Low Power Electric Vehicles using Machine Learning

The following project has been done as part of my Practice School-1 cirriculum under CSIR - Central Electronics Engineering Research Institute (CEERI), Pilani. It enabled me to work on real-world i...
Academic Projects at BITS Pilani
Swarm Robot Coordination

Abstract Swarm robotics is an emerging field that enables a group of robots to collaborate and achieve complex tasks that are difficult for a single robot to accomplish. One of the key challenges ...
Chess Engine using Reinforcement Learning
Abstract Machine learning based chess engines have always proven themselves to outperform human capabilities in the strategic field of chess. The number of possibilities after every move someone m...
Third-order Tchebyshev Low-pass Filter
Abstract Given the significance of microwave filters in real-world systems and the wide variety of potential applications, the domain of microwave filter design has been overgrowing. Modern comput...
Underwater Depth Estimation and Localization

Abstract Sophisticated robots operating in an underwater environment require vision to perform different tasks. This project involves developing a reliable vision system by employing a depth cam...
Thruster Control of AUV Using LQR
Abstract To make two different control system models in Simulink on PID and LQR controllers respectively and to get the results for positional and velocity parameters of the ROV based on the de...
Autonomous Ground Vehicle
To be Updated
Quadcopter Navigation
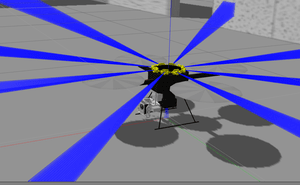
Implementing Semi-Direct Visual Odometry (SVO) on drones for autonomous navigation. Code and ROS bag for sample implementation taken from: Github 1 Github2
Smart Agricultural Seeding Robot
Electronics Arduino Code 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 #include <Servo.h> Servo myservo;...
SAUVC
The Singapore AUV Challenge!

About The Singapore Autonomous Underwater Vehicle Challenge (SAUVC) is an annual international competition that aims to promote the development of autonomous underwater vehicles (AUVs) and encoura...
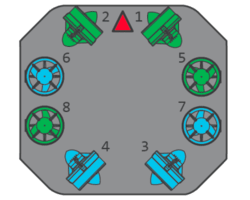
AUV Simulation
Simulation is an important aspect of building an Autonomous Underwater Vehicle (AUV). It allows the team to test and validate the robot’s design and performance in a controlled environment before d...
Object Detection
Object detection is a computer technology related to computer vision and image processing that deals with detecting instances of semantic objects of a certain class in digital images and videos. On...
Acoustic Localization
Localization is required to complete the target acquisition and re-acquisition task in the challenge. The pingers fitted to the drums act as an acoustic source. A 2/3/4 acoustic sensor setup can be...
Personal Projects
CubeD

CubeD is an interactive touch-based display that lets users engage and play games. Mechanical Design CubeD consists of 200 squares hinged onto a 4 segment steel back panel. Its current dimensions...
Recognizing Traffic Signs using CNNs

Introduction The following project shows the implementation of a simple convolutional neural network (CNN). The model will be able to identify which signal it is when presented with a colour ima...
Persistence of Vision Wand

Introduction POV (Persistence of Vision) is a kind of optical illusion in which a visual image seems to persist even when the light from it ceases to enter our eyes. This can be used to make POV d...
Disaster Management System for Floods using IoT and ML

Introduction Floods are the most catastrophic and cataclysmic events of all-natural disasters. The World Meteorological Organization has stated that out of all the disasters in the world, floods...
Robotic Arm on ROS

Introduction The aim of this project is to build a robot manipulator on ROS (Robot Operating System). A robot manipulator is a basically a set of links and joints that together forms an arm. By ...