Your browser does not support PDFs. Please download the report here.
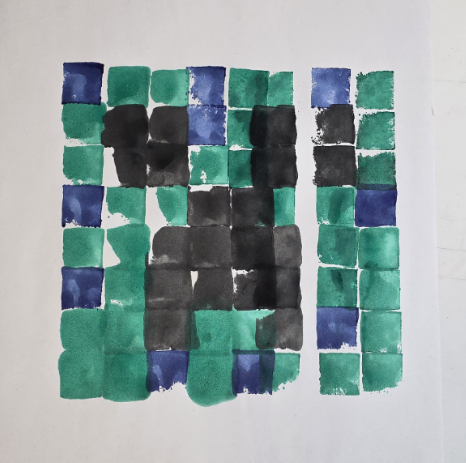
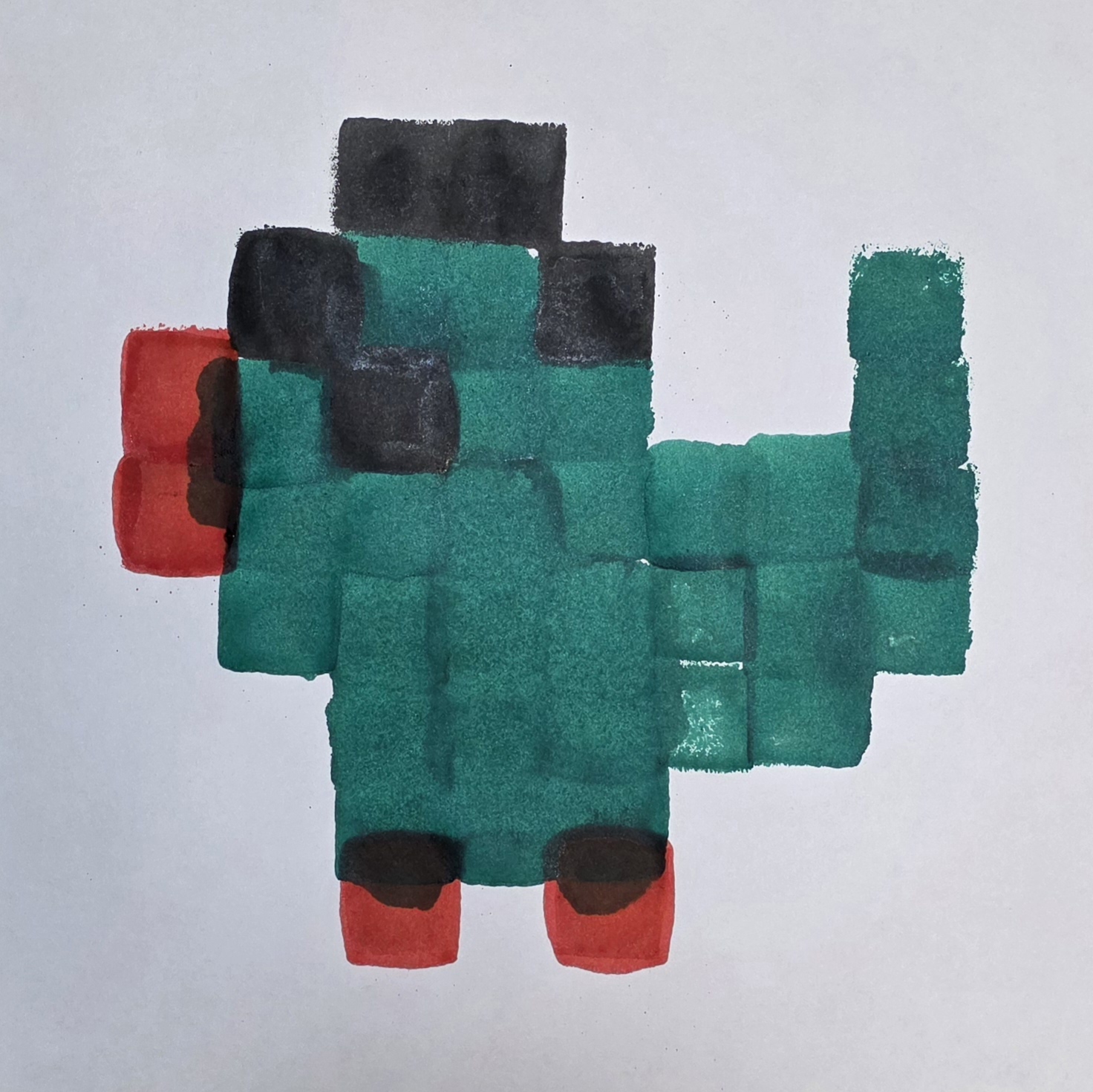
Adaptive Pixel Art using a Franka Arm Demo Minimum Viable Product Stretch Goal Images Ground Truth Franka Pixel Art Report Your bro...
TEMU: Tactile Encoder for Manipulation Your browser does not support PDFs. Please download the report here. Your browser does not support PDFs. Please download the report here.
In progress Blog These are my notes as part of the 16-782 Planning and Decision-making in Robotics class taken by Dr. Maxim Likhachev. Basics and Sampling-Based Motion Planning All About Se...
Learning for 3D Vision
Robot Autonomy
A new version of content is available.